2020 – IMS Pi Wars Team is back !
Yes! Ipswich Makerspace is back again! This time with a tweaked team and a tweaked robot.
This years theme is disaster zone, which is quite fitting if you look at last years performance. We should just enter last years robot!
Come and meet the 2020 team!
So who are the Ipswich Makerspace team – 2020 ?
Currently the team is made up by last years team Jon, Mal, Matt and James!. Mal will be taking care of our blogging again! (I apologise in advance).
Jon
Jon started out with computers when a family friend gave him an old MS-DOS machine in the early nineties. From there a string of different types of hardware, including many home built machines, quickly showed that Jon was destined for a career in computing.

Starting with web site development using HTML and CSS Jon quickly progressed onto JavaScript, PHP and then Java. It was around this time that Jon began studying electronics at school and that sparked an interest in computer control and automation of real world objects.
In 2004 Jon started a course studying Computer science at the University of Southampton. This introduced him to a whole host of new technology included object oriented development, linux and c/c++.
In 2008 Jon moved to Ipswich and started a job at BT in Ipswich as a software engineer working at the one small part of BT that actually works on the phone network. Currently he works developing SIP soft switches for large corporate customers.
Despite his day to day focus on software Jon has continued his interest in hardware and electronics. Home automation is a particular focus of his spare time but also robotics, 3D printing and multi rotor aircraft.
Jon is the Ipswich Makerspace webmaster, has been involved in organising the first Ipswich Raspberry Jam and gives talks at several local tech groups.
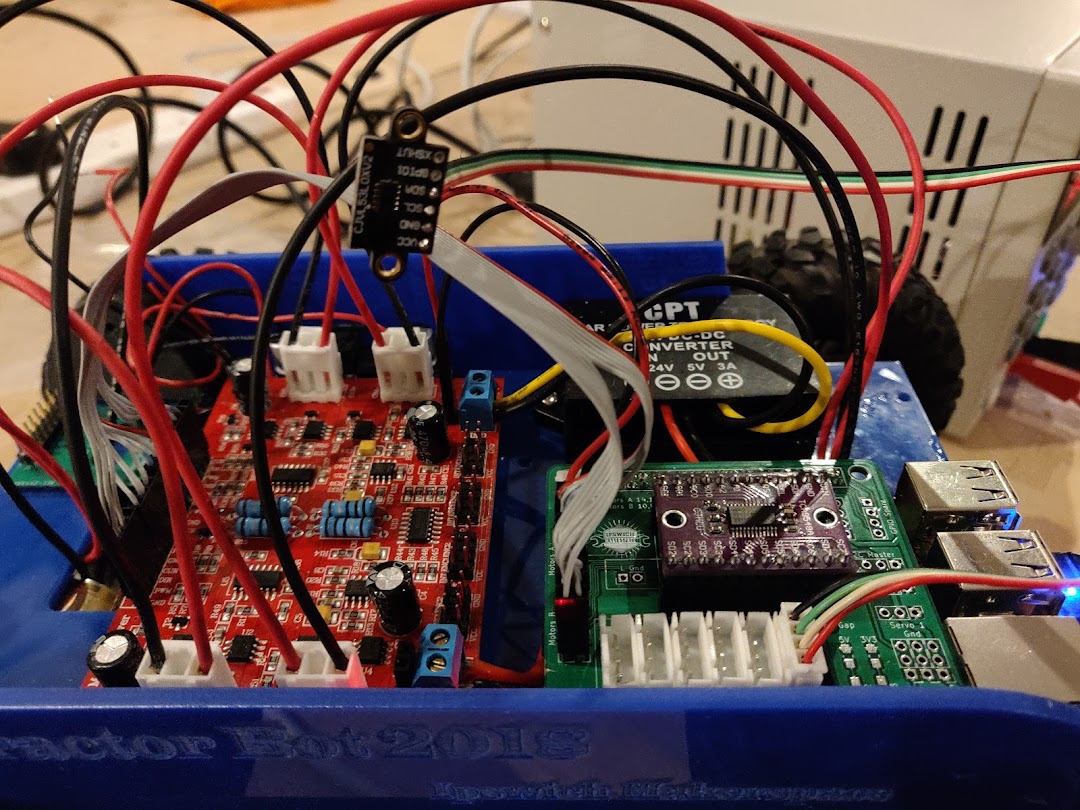
Joining the tractor bot team for this year Jon is focusing on adding additional sensors to further tune to robots performance in the various challenges.
James Fordham
A magical 3D printing wizard